raft
raft算法一个非拜占庭的一致性算法, 即所有通信是正确的而非伪造的. N 个结点的情况下(N为奇数)可以最多容忍 (N-1)/2 个结点故障.
raft中的三个角色
- follower: 蓝色实心小球
- candidate: 外围虚线的蓝色实心小球
- leader: 外围实线的蓝色实心小球
RPC
raft算法中各个结点之间通信使用的是RPC, 一致性算法只需两种类型的RPC, 为了在结点之间传递快照而增加了第三种RPC.
- RequestVote RPC: candidate 在选举领导人期间发起
- AppendEntries RPC: leader 发起的一种心跳机制, 复制日志也在该命令中完成
- InstallSnapshot RPC: leader 使用该 RPC来发送快照给太落后/新加入集群的 follower
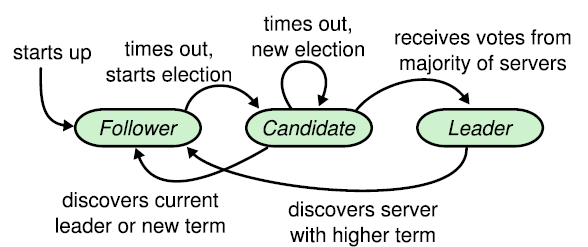
领导人选举
开始时候所有结点(奇数个)的角色都是:follower, 每个节点都有一个随机时长的定时器, follower在该定时器定义的超时时间内(150ms ~ 300ms)等待 leader的请求(心跳)信息. 如果在超时时间内未等到 leader的请求(心跳)信息, 则该 follower会立即转换成 candidate 角色, 并将自己的任期 term加1, 然后立即去向其他的 follower发送 VoteRequest 去征求其他 follower的支持(同意).
如果此时该 candidate 收到超过半数的 follower的支持, 则该 candidate会立即更换成 leader 角色, 并向所有的 follower 发送通知(注意:这类消息的通过心跳传递的, follower收到必须返回), follower收到 leader的上任通知后自动更新自己的任期和leader的保持一致, 并更新leader角色的所属节点. 此后如果该leader不会挂掉, 那么它总是会不停的向各个 follower发送心跳来维护自己的地位.
follower每次收到来自 leader的信息都会重新更新定时器.
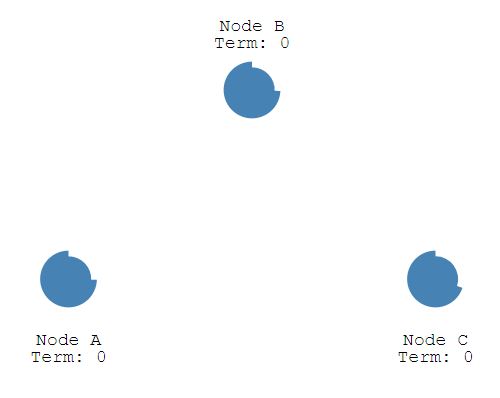
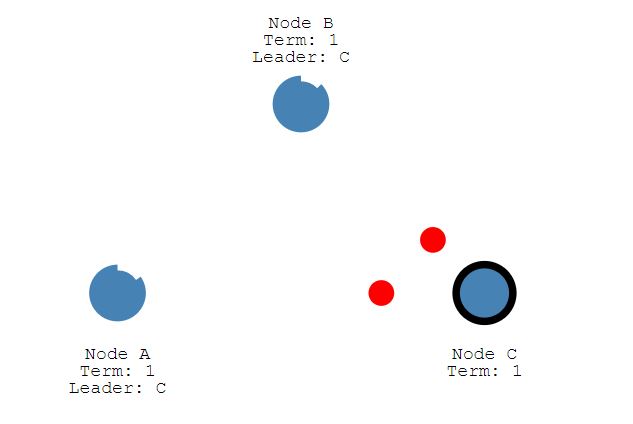
初始状态
所有节点的初始状态都是 follower:
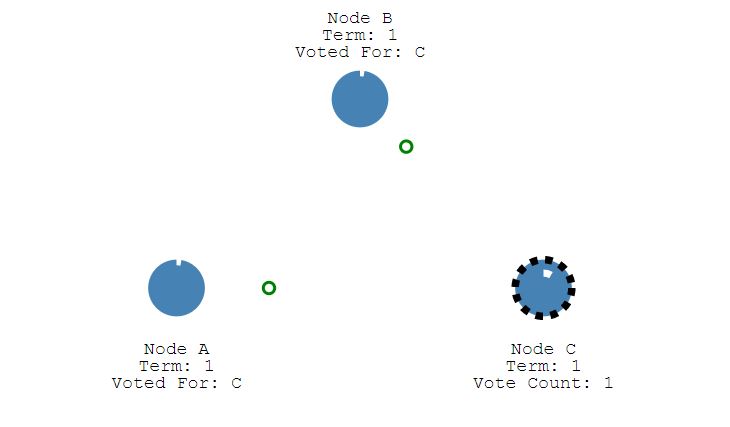
出现候选人并进行选举
-
在 follower的定时器超时之后, 会自动更新成 candidate 角色, 并将自己的任期+1, 以及自己给自己投一票:
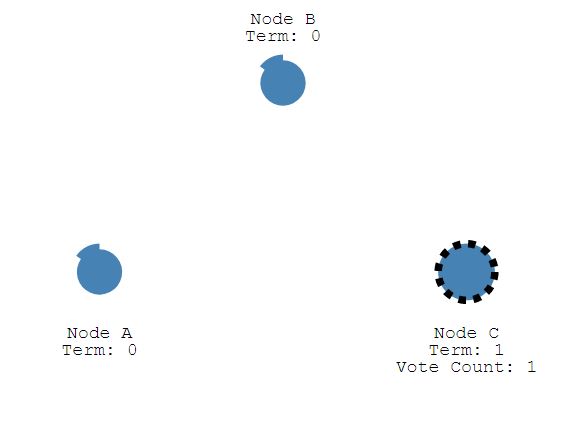
-
candidate 向其他节点发送 RequestVote:
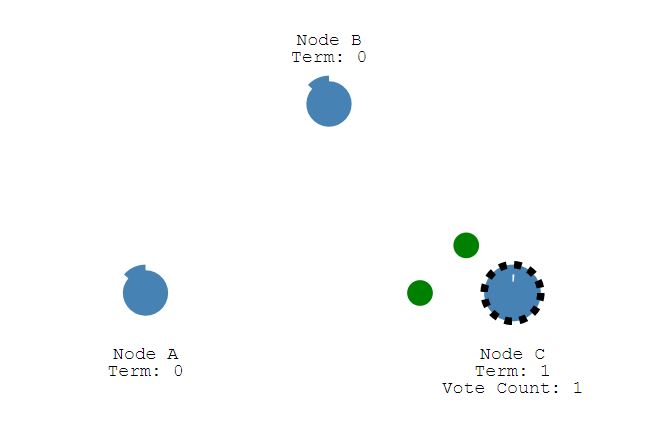
发送 RequestVote的结果有三种:
- 赢得了多数的选票, 成功选举为leader
- 收到leader的消息, 表示有其他服务器已经抢先当选了leader
- 没用服务器赢得超过半数的选票, leader选举失败, 等待选举时间超时后发起下一轮的选举
-
由于candidate将自己的任期+1, 而其他结点的follower如果未在该任期投票, 则这些未在该任期投票的follower将会给这个 candidate进行投票支持并返回, 此时, 这些投给该任期的 candidate节点的 follower节点更新自己的任期与candidate保持一致, 并记录该任期的票投给了哪个 candidate, 并重置超时定时器:
-
一旦该 candidate获得了超半数的选票, 则该candidate立即更新成 leader角色:
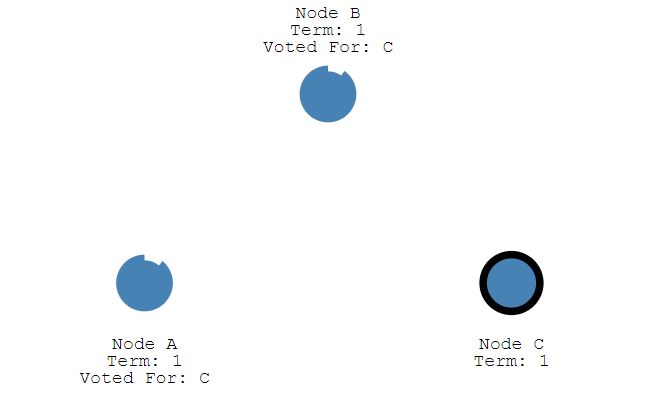
-
leader 将立即发送 AppendEntries消息给所有的 follower, 这些消息是通过内部指定的心跳来传递的:
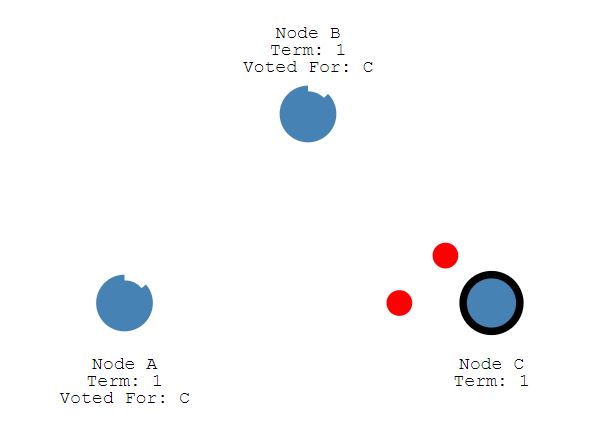
-
follower 对 AppendEntries消息是必须返回的, 同时更新自己的leader以及任期:
-
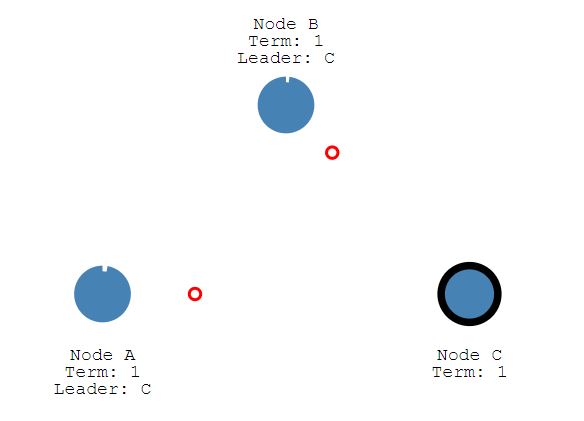
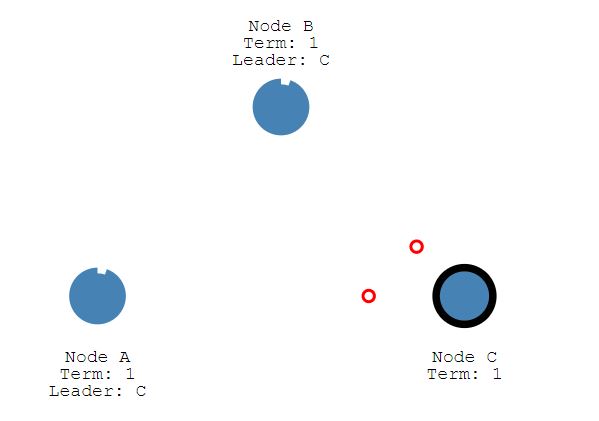
领导人选举过程结束, 此后follower和leader之间通过心跳传递信息, 直到leader挂或者 follower未收到心跳, 其他follower自动成为 candidate:
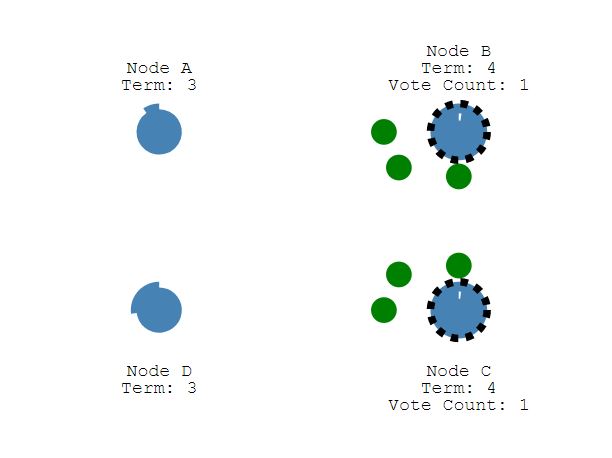
多个结点同时成为候选人的选举过程
-
B,C同时成为同一任期的候选人, 并同样的收到相同个数的选票(算上自己投自己的一票):
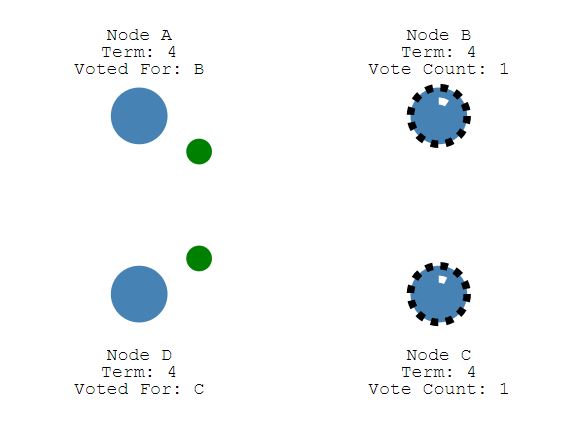
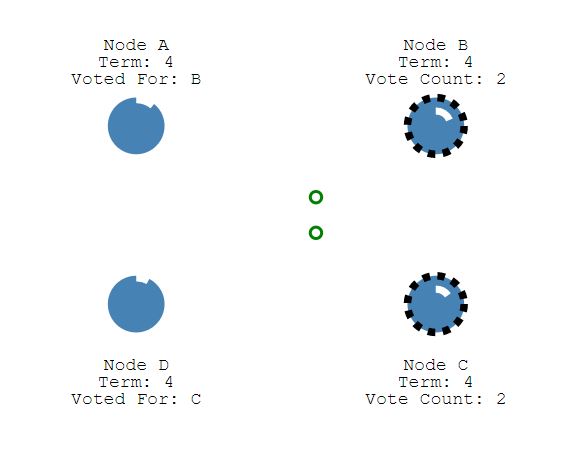
-
出现这种状况后, 所有节点原地等待, 直到自己的随机定时器超时, 并迅速更换角色进行新一轮的选举.
网络分区导致的领导人选举
某一 follower 结点与 leader 间通信发生问题, 导致发生了分区, 这时没有 leader 的那个分区就会进行一次选举. 这种情况下, 因为要求获得多数的投票才可以成为 leader, 因此只有拥有多数结点的分区可以正常工作. 而对于少数结点的分区, 即使仍存在 leader, 但由于写入日志的结点数量不可能超过半数因此不可能提交操作. 这解释了为何 raft 至多容忍 (N-1)/2 个结点故障.
这解释了每个结点会如何在三个状态间发生变化:
任期
每一个任期以一次选举作为起点, 所以当一个结点成为 candidate 并向其他结点请求投票时, 会将自己的 Term 加 1, 表明新一轮的开始以及旧 leader 的任期结束. 所有结点在收到比自己更新的 Term 之后就会更新自己的 Term 更新至最新, 这些结点也立即转换成 follower角色, 而收到过时的消息(任期比自己小)则拒绝该请求.
在一次成功选举完成后, leader 会负责管理所有结点直至任期结束. 如果没有产生新的 leader 就会开始一轮新的 Term. 任期在 raft 起到了类似时钟的功能, 用于检测信息是否过期.
投票限制
在投票时候, 所有 follower 结点采用先来先得的原则, 在一个任期内只可以投票给一个结点, 得到超过半数的投票才可成为 leader, 从而保证了一个任期内只会有一个 leader 产生(Election Safety). 在 raft 中日志只有从 leader 到 follower 这一流向, 所以需要保证 leader 的日志必须正确, 即必须拥有所有已在多数结点上存在的日志, 这一步骤由投票来限制.
在 raft 中所有日志条目都是从 leader结点写入 follower结点, 且 leader结点上的日志只会增加, 绝不会删除或者覆盖. 这意味着leader结点必须包含所有已经提交的日志, 即:能被选举为leader的结点一定需要包含所有已经提交的日志.
这就是leader选举的限制:能被选为leader的结点, 一定包含了所有已经提交的日志条目.
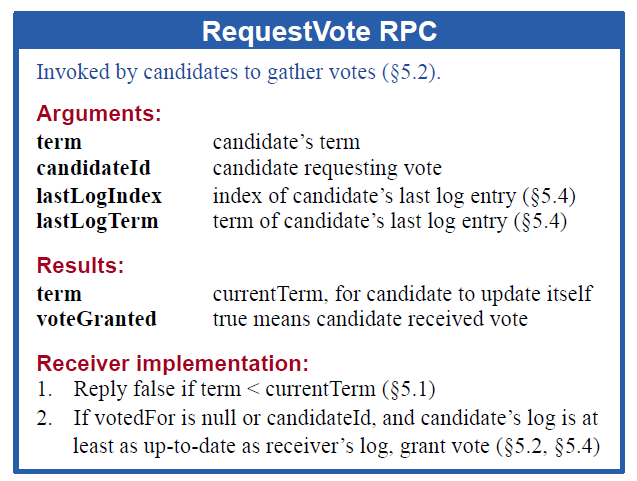
投票由一个 RequestVote的RPC调用进行, 请求中除了有 candidate自己的任期 term 和 id之外, 还要带有自己最后一个日志条目的index 和 term. 接收者收到后首先会判断请求的term是否更大, 不是则说明消息是旧的, 拒绝该请求. 如果任期更大则开始判断日志是否更新. 日志 term 越大则越新, 日志term相同那么index较大的为更新的日志. 接收者只会投票给拥有相同或者更加新的日志的 candidate.
由于只有日志在被多数结点复制之后才会提交并返回, 所以如果一个 candidate并不拥有最新的已被复制的日志, 那么他不可能获得多数票, 从而保证了 leader 一定具有所有已被多数拥有的日志(leader Completeness), 在后续同步时会将其同步给所有结点.
定时器
定时器时间的设定实际上也会影响到算法性能甚至是正确性. 试想一下这样一个场景, leader 下线, 有两个结点同时成为 candidate, 然后由于网络结构等原因, 每个结点都获得了一半的投票, 因此无人成为 leader 进入了下一轮. 然而在下一轮由于这两个结点同时结束, 又同时成为了 candidate, 再次重复了之前的这一流程, 那么算法就无法正常工作.
为了解决这一问题, raft 采用了随机定时器, 随机时长(150 ~ 300ms). 通过这一方法避免了两个结点同时成为 candidate, 即使发生了也能快速恢复. 这一长短必须长于 leader 的心跳间隔, 否则在正常情况下也会有 Candidate 出现导致算法无法正常工作.
日志复制
- leader 绝不会覆盖或删除自己的日志, 只会追加 (leader append only)
- 如果两个日志的index 和 term 相同, 那么这两个日志相同 (log matching)
- 如果两个日志相同, 那么他们之前的日志均相同
第一条:成为leader的结点里的日志一定拥有所有已被多数结点拥有的日志条目, 所以先前的日志条目很可能已经被提交, 因此不能删除之前的日志. 第二条:一个任期内只能有一个leader, leader只会为一个日志条目创建一个index, 而且一旦写入就不会修改, 因此保证了日志的唯一性. 第三条:因为在写入日志时会检查前一个日志是否一致, 因此递归推算保证了前边的日志都是一致的. 从而也保证了当一个日志被提交之后, 所有结点在该index上提交的内容是一样的. (原因:每次RPC发送附加日志时, leader会把这条日志条目的前面的日志的下标和任期号一起发给follower, 如果follower发现和自己的日志不匹配, 那么就拒绝接受这条日志, 这称之为一致性检查)
日志复制的过程
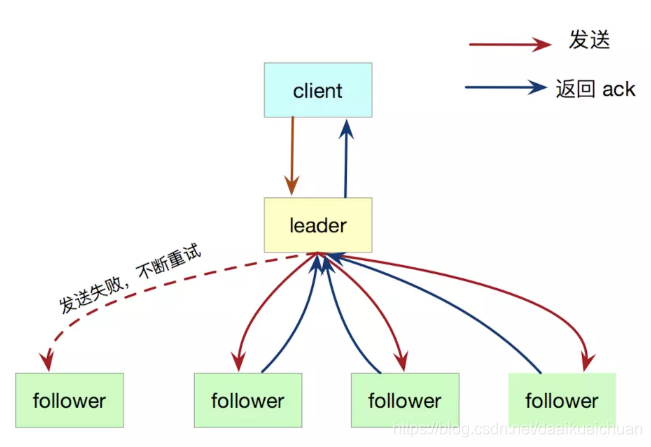
leader选出后, 就开始接受客户端的请求.
- 客户端的每一个请求都包含被复制状态机执行的指令.
- leader把这个指令作为一条新的日志条目添加到日志中, 然后并行发起 RPC 给其他 follower, 让这些 follower复制这条信息
- 假如这条日志被安全的复制, 领导人就应用这条日志到自己的状态机中, 并返回给客户端.
- 如果 follower 宕机/运行缓慢/丢包, leader会不停的重试, 直到所有的 follower最终都复制了所有的日志条目
日志的组成
日志是由‘有序编号log index’的日志条目组成, 每个日志条目包含它被创建时的任期号(term) 和用于状态机执行的命令. 如果一个日志条目被复制到大多数的结点服务器上, 就会被认为是可提交的(commit).
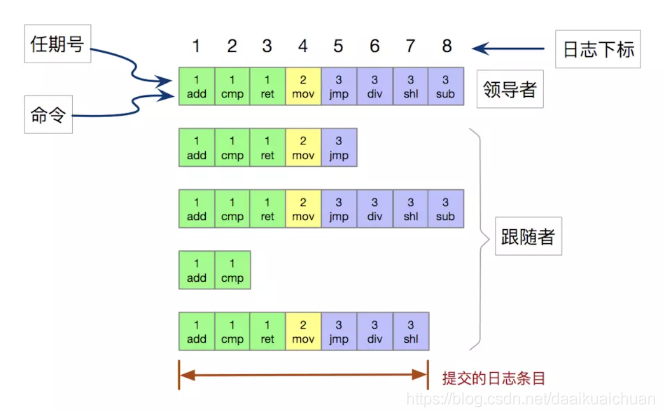 上图显示, 共有8条日志, 提交了7条. 提交的日志都将通过状态机持久化到磁盘中, 防止宕机.
上图显示, 共有8条日志, 提交了7条. 提交的日志都将通过状态机持久化到磁盘中, 防止宕机.
日志同步过程
日志同步是由一个 Append Entries的 RPC调用来实现的, leader会给每个 follower发送该 RPC以追加日志, 请求中除了当前任期term, leader的id和已提交的日志index, 还有将要追加的日志列表(空则为心跳包), 前一个日志的 index 和 term.
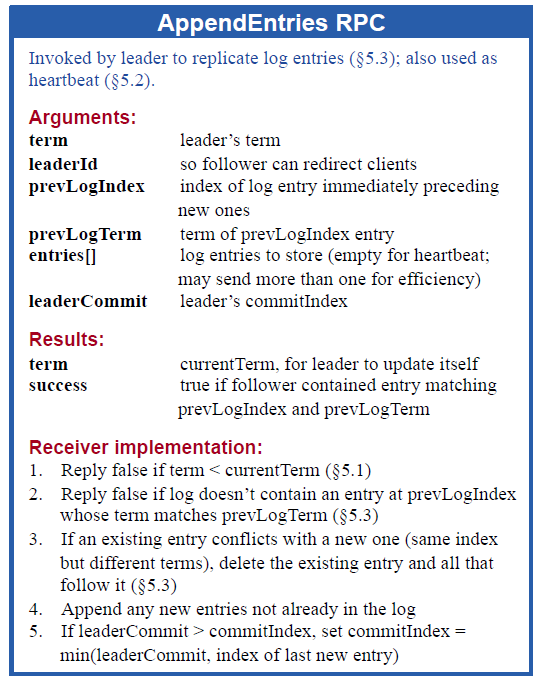
当接收到该请求后, 会先检查 term, 如果请求中的 term 比自己的小说明已过期, 拒绝请求. 之后会对比先前日志的 index 和 term, 如果一致, 那么由前提可知前面的日志均相同, 那么就可以从此处更新日志, 将请求中的所有日志写入自己的日志列表中, 否则返回 false. 如果发生 index 相同但 term 不同则清空后续所有的日志, 以 leader 为准. 最后检查已提交的日志 index, 对可提交的日志进行提交操作.
leader 会维护 nextIndex[] 和 matchIndex[] 两个数组, 分别记录了每个 follower 下一个将要发送的日志 index 和已经匹配上的日志 index. 每次成为 leader 都会初始化这两个数组, 前者初始化为 leader 最后一条日志的 index 加 1, 后者初始化为 0. 每次发送 RPC 时会发送 nextIndex[i] 及之后的日志, 成功则更新两个数组, 否则减少 nextIndex[i] 的值重试, 重复这一过程直至成功.
这里减少 nextIndex 的值有不同的策略, 可以每次减一, 也可以减一个较大的值, 或者是跨任期减少, 用于快速找到和该结点相匹配的日志条目. 实际中还有可能会定期存储日志, 所以当前日志列表中并不会太大, 可以完整打包发给对方, 这一做法比较适合新加入集群的结点.
日志的不正常情况的解决方法
一般情况下, leader和Followers的日志保持一致, 因此 AppendEntries 一致性检查通常不会失败. 然而, leader崩溃可能会导致日志不一致: 旧的leader可能没有完全复制完日志中的所有条目.
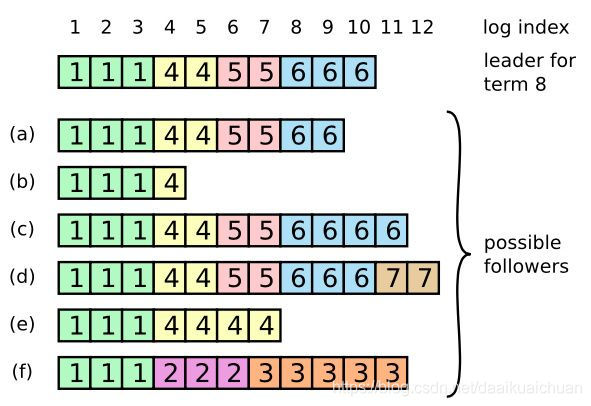
下图阐述了一些Followers可能和新的leader日志不同的情况.
一个Follower可能会丢失掉leader上的一些条目, 也有可能包含一些leader没有的条目, 也有可能两者都会发生. 丢失的或者多出来的条目可能会持续多个任期.
正确的日志复制过程
leader通过强制Follower复制它的日志来处理日志的不一致, Followers上的不一致的日志会被leader的日志覆盖. leader为了使Followers的日志同自己的一致, leader需要找到Followers同它的日志一致的地方, 然后覆盖Followers在该位置之后的条目.
具体的操作是:leader会从后往前试, 每次AppendEntries失败后尝试前一个日志条目, 直到成功找到每个Follower的日志一致位置点, 然后向后逐条覆盖Followers在该位置之后的条目.
总结一下就是:当 leader 和 follower 日志冲突的时候, leader 将校验 follower 最后一条日志是否和 leader 匹配, 如果不匹配, 将递减查询, 直到匹配, 匹配后, 删除冲突的日志. 这样就实现了主从日志的一致性.
##日志的提交
只要日志在多数结点上存在, 那么 leader 就可以提交该操作. 但是 Raft 额外限制了 leader 只对自己任期内的日志条目适用该规则, 先前任期的条目只能由当前任期的提交而间接被提交.
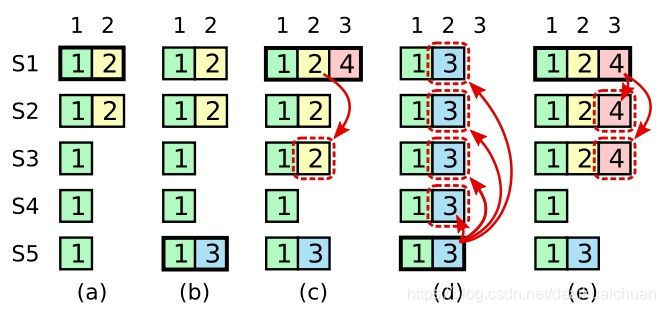
例如论文中图 8 这一 corner case. 一开始如 (a)所示, 之后 S1 下线, (b)中 S5 从 S3 和 S4 处获得了投票成为了 leader 并收到了一条来自客户端的消息, 之后 S5 下线. (c)中 S1 恢复并成为了 leader, 并且将日志复制给了多数结点, 之后进行了一个致命操作, 将 index 为 2 的日志提交了, 然后 S1 下线. (d)中 S5 恢复, 并从 S2、S3、S4 处获得了足够投票, 然后将已提交的 index 为 2 的日志覆盖了.
为了解决这个问题,Raft 只允许提交自己任期内的日志,从而日志 2 只能像 (e)中由于日志 3 同步而被间接提交,避免了 Follower 中由于缺少新任期的日志,使得 S5 能够继续成为 Leader。
日志压缩
在实际的系统中,不能让日志无限增长,否则系统重启时需要花很长的时间进行回放,从而影响可用性。Raft采用对整个系统进行snapshot来解决,snapshot之前的日志都可以丢弃(以前的数据已经落盘了)。
每个副本独立的对自己的系统状态进行snapshot,并且只能对已经提交的日志记录进行snapshot。
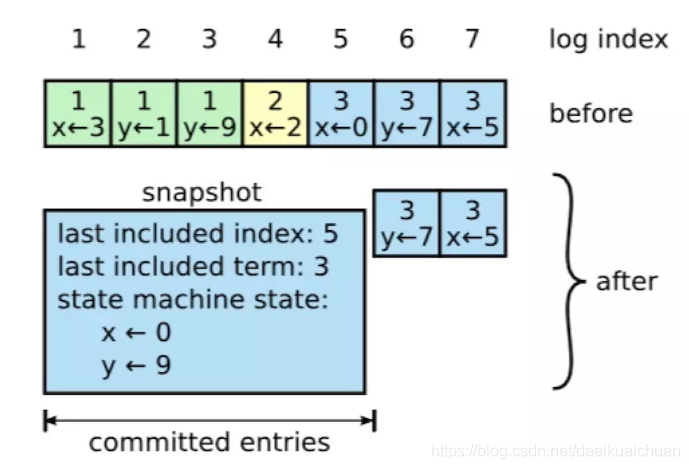
Snapshot中包含以下内容:
- 日志元数据,最后一条已提交的 log entry的 log index和term。这两个值在snapshot之后的第一条log entry的AppendEntries RPC的完整性检查的时候会被用上。
- 系统当前状态
当Leader要发给某个日志落后太多的Follower的log entry被丢弃,Leader会将snapshot发给Follower。或者当新加进一台机器时,也会发送snapshot给它。发送snapshot使用InstalledSnapshot RPC。 做snapshot既不要做的太频繁,否则消耗磁盘带宽, 也不要做的太不频繁, 否则一旦节点重启需要回放大量日志, 影响可用性. 推荐当日志达到某个固定的大小做一次snapshot。 做一次snapshot可能耗时过长,会影响正常日志同步。可以通过使用copy-on-write技术避免snapshot过程影响正常日志同步。
安全性
raft 增加了以下两条限制以保证安全性:
- 拥有最新的已提交的log entry的Follower才有资格成为leader
- leader只能推进commit index来提交当前term的已经复制到大多数服务器上的日志, 旧term日志的提交要等到提交当前term的日志来间接提交(log index 小于 commit index的日志被间接提交)
成员变更问题
常规处理成员变更存在的问题
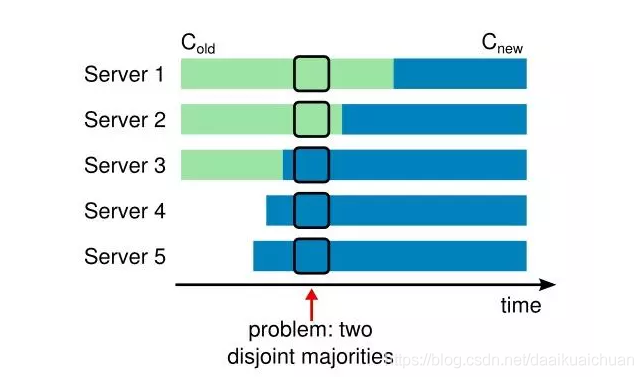
我们先将成员变更请求当成普通的写请求,由领导者得到多数节点响应后,每个节点提交成员变更日志,将从旧成员配置(Cold)切换到新成员配置(Cnew)。但每个节点提交成员变更日志的时刻可能不同,这将造成各个服务器切换配置的时刻也不同,这就有可能选出两个领导者,破坏安全性。
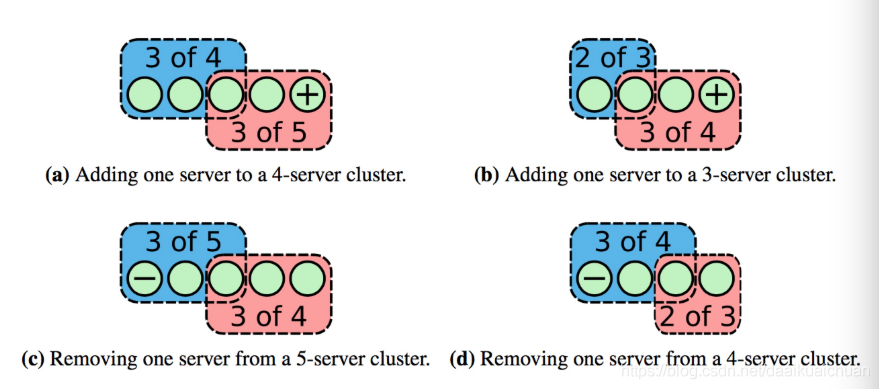
考虑以下这种情况:集群配额从 3 台机器变成了 5 台, 可能存在这样的一个时间点, 两个不同的领导者在同一个任期里都可以被选举成功(双主问题), 一个是通过旧的配置, 一个通过新的配置.
简而言之,成员变更存在的问题是增加或者减少的成员太多了,导致旧成员组和新成员组没有交集,因此出现了双主。
解决方案之一是阶段性成员变更
每次成员变更只允许增加或删除一个成员(如果要变更多个成员,连续变更多次)